

目前,自动化行业对柔性生产的要求越来越高。工业机器视觉产品将逐步小型化、智能化。三维视觉技术结合直线模组被应用到更加智能化的硬件产品中。广泛应用于3D打印、组装、建筑、电子、物流、仓储、生产制造、医药、农业等生产领域。 利用三维视觉技术可以获得物体的深度信息,然后通过对算法的精确定位,使直线模组搭建的机器能够在生产过程中更准确地使用和控制材料。从硬件的角度来看,这需要更好的三维扫描仪和三...
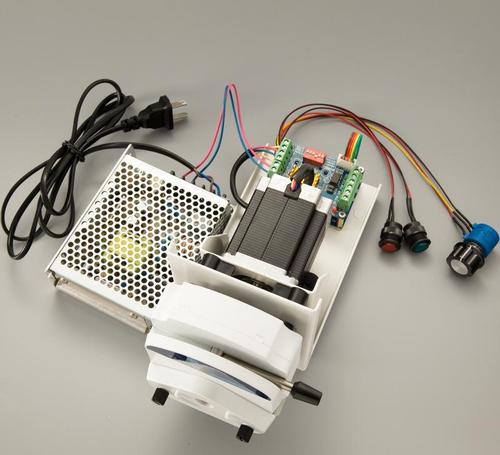
光电开关常常被用作步进电机控制系统、伺服电机控制系统的零位传感器,因为它的灵敏度和精度远高于接近开关。的红外线不是一个点,而是一个面,当发射端与接收端之间的射线被遮挡,达到阈值才判定为状态改变,发出信号。普通光电开关的误差几丝到几十丝,即便一些所谓的进口高端光电开光号称0.0001mm,在实际应用中也达不到这个精度,因为光电开关必然会受到粉尘、外界光线、遮挡物本身的透光率、折射率影响。 ...
减速机一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速机也会有几对相同原理齿轮达到理想的减速效果,那么它在使用时有什么技巧呢?下面大家一起来看看吧。 1、在运转200~300小时后,应进行首回换油,在以后的使用中应定期检查油的质量,对于混入杂质或变质的油须及时更换。一般情况下,对于长期连...
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度...

扭力计算对减速机的寿命一般而言,扭力计算能力非常具有重要,并且我们要注意通过加速度的大转矩值(TP),是否过减速机之大负载扭力. 对于通常在市场上的应用电源功率伺服模式,适用性高减速占空比可保持在1.2以上,也可以在自己的需要选择,以决定有两个要点 A.选用伺服控制电机的出力轴径不能满足大于通过表格上大使用轴径. B.如果扭矩计算工作,转速可以满足正常运行,但在伺服全输出时,存在不足...
1.仔细擦净导轨和丝杠表面的油污,特别是沟槽里的油污。 2.用黄油枪通过注油油嘴向传动腔(导轨滑块或丝杠螺母)内部加油,直至内部污油被挤出。铲除被挤出的污油。 3.用手指在丝杠(导轨)表面涂少量油脂,优先保证沟槽内均匀涂抹。 4.手推丝母(滑座)来回往复几次,确保油膜均匀。 5.铲除多余的油脂,暖机。...

(1).利用空间直线度测量仪测量出导轨水平和铅垂方向的直线度误差,并且计算出各测点相对最小二乘中线的偏移量。 (2).根据计算结果的,确定直线基准。然后根据相应点的偏移量,为各处增加材料,调整好导轨,使其在两个平面的直线度误差达到要求。 第二条直线导轨的平行度校直 (1).首先,测量出该直线导轨的直线度误差和各测点的相对坐标(偏移量)(第二条导轨只与下安装台面固连);然后,分别用水平...

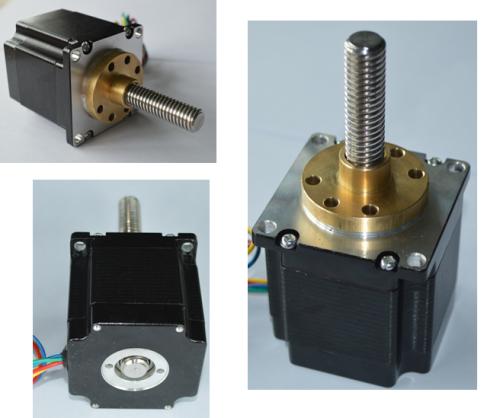
57DS数字式一体化低压伺服电机特点: 1.工作电压:直流输入电压15VDC-50VDC,推荐工作电压36V 2.连续输出电流最大值10A,最大峰值电流22A(3倍的过载能力) 3.可接受差分和单端式脉冲/方向指令,具有位置/速度/力矩三种控制模式 4.采用FOC磁场定位控制技术和空间矢量脉宽调制(SVPWM)控制技术 5.每圈脉冲数可通过调试软件或拔码设定(电子齿轮比) 6....
 13316953177
13316953177 20年专注自动化设备的减速电机研发生产
20年专注自动化设备的减速电机研发生产 所在位置:
所在位置: 13316953177
13316953177 

